звоните нам Пн-Пт с 9 до 19,
Сб с 10 до 16
Сб с 10 до 16
В учебнике приведены основные сведения по навигации, рассмотрены счисление пути и определение места судна визуальными методами, с помощью радиотехнических средств и спутниковых систем, а также вопросы плавания при особых обстоятельствах; нашли отражение новейшие достижения в области судовождения за последнее время.
Предназначен для учащихся высших инженерных морских училищ, а также может быть использован в учебном процессе на курсах усовершенствования командного состава морских судов. Первое издание книги вышло в свет в 1980 г.
При изучении материала учебника рекомендуется одновременно пользоваться Задачником по навигации и лоции под редакцией М. И. Гаврюка (М., Транспорт, 1984), в котором даны соответствующие практические примеры. Обозначения и сокращения, применяемые в книге, приведены в соответствии с данными Наставления по организации штурманской службы на судах Министерства морского флота Союза ССР (НШС-82).
ОГЛАВЛЕНИЕ
Введение
Р аздел 1 ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Глава I. Основные понятия
§ 1. Форма и размеры Земли
§ 2. Географические координаты
§ 3. Морские единицы длины и скорости
§ 4. Разность широт и разность долгот
§ 5. Видимый горизонт
§ 6. Дальность видимости огней и предметов
§ 7. Счет направлений в море
Глава II. Определение направлений в море
§ 8. Использование магнитного компаса
§ 9. Выборка магнитного склонения
§ 10. Определение девиации магнитного компаса
§ 11. Гироскопический компас
§ 12. Контроль за работой компасов в море
Глава III. Определение пройденного расстояния в море
§ 13. Скорость морских судов
§ 14. Определение скорости судна
§ 15. Измерение пройденного расстояния в море
§ 16. Определение поправки лага
Раздел 2
КАРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ И МОРСКИЕ КАРТЫ
Глава IV. Меркаторская проекция
§ 17. Общие сведения из теории картографических проекций
§ 18. Локсодромия
§ 19. Требования, предъявляемые к навигационной карте
§ 20. Теория меркаторской проекции
§ 21. Построение меркаторской карты
§ 22. Измерение расстояний на картах в меркаторской проекции
Глава V. Другие виды картографических проекций, применяемых в навигации
§ 23. Перспективные проекции. Общие сведения
§ 24. Гномоническая проекция
§ 25. Стереографическая проекция
§ 26. Поперечная цилиндрическая проекция Меркатора
Глава VI. Морские навигационные карты
§ 27. Классификация морских карт
§ 28. Степень доверия к морским навигационным картам
§ 29. Использование для судовождения карт других стран
Раздел 3 СЧИСЛЕНИЕ ПУТИ СУДНА
Глава VII. Графическое счисление (прокладка)
§ 30. Элементы счисления и их характеристика. Прокладка при отсутствии дрейфа и течения
§ 31. Циркуляция судна. Способы учета циркуляции при прокладке
§ 32. Дрейф судна. Учет дрейфа при прокладке
§ 33. Учет постоянного течения при прокладке
§ 34. Учет приливо-отливного течения
§ 35. Совместный учет дрейфа и течения
§ 36. Определение пути судна по пеленгам неподвижного ориентира и времени
§ 37. Точность графического счисления
Глава VIII. Аналитическое (письменное) счисление
§ 38. Основные формулы аналитического (письменного) счисления
§ 39. Виды аналитического счисления
§ 40. Точность аналитического счисления
Раздел 4 ВИЗУАЛЬНЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ МЕСТА СУДНА В МОРЕ
Глава IX. Метод изолиний и линий положения
§ 41. Общие понятия
§ 42. Изолиния и линия положения
§ 43. Смещение изолинии
§ 44. Оценка точности полученных обсерваций
Глава X. Определение места судна по измерению направлений
§ 45. Способ измерения горизонтальных углов
§ 46. Способ пеленгов трех ориентиров
§ 47. Способ двух пеленгов
Глава XI. Визуальные методы определения места судна по измерению расстояний
§ 48. Определение расстояния до предмета, расположенного ближе видимого горизонта
§ 49. Определение расстояния до предмета с учетом сферичности Земли и земной рефракции
§ 50. Глазомерное измерение расстояний
§ 51. Определение места судна по измерению расстояний
Глава XII. Определение места судна по разновременным линиям положения
§ 52. Крюйс-пеленг
§ 53. Исправленный крюйс-пеленг
§ 54. Определение места судна по крюйс-расстоянию
§ 55. Определение места судна способом «исправленное крюйс-расстояние
§ 56. Общее графическое решение задач с использованием разновременных линий положения
Глава XIII. Комбинированные и частные случаи определения места судна
§ 57. Определение места судна по пеленгу и расстоянию
§ 58. Определение места судна по пеленгу и горизонтальному углу; по пеленгу (расстоянию, углу) и глубине
§ 59. Определение поправки относительного лага по обсервациям
§ 60. Связь между счислением и обсервациями
Раздел 5 ПРИМЕНЕНИЕ РАДИОТЕХНИЧЕСКИХ СРЕДСТВ В НАВИГАЦИИ
Глава XIV. Определение места судна по радиопеленгам
§ 61. Общие понятия
§ 62. Радиокурсовой угол. Истинный радиопеленг
§ 63. Определение радиодевиации
§ 64. Изолинии при радиопеленговании
§ 65. Ортодромическая поправка
§ 66. Способы прокладки радиопеленгов на морских навигационных картах
§ 67. Точность радиопеленгования и определения места по радиопеленгам
Глава XV. Использование радиомаяков направленного действия
§ 68. Принцип действия секторного радиомаяка
§ 69. Основные эксплуатационные данные секторных радиомаяков
§ 70. Способы получения места судна
§ 71. Использование других радиомаяков направленного действия
Глава XVI. Использование гиперболических радионавигационных систем
§ 72. Классификация. Сферическая гипербола. Общая характеристика точности гиперболических РНС
§ 73. Определение места с помощью импульсных РНС
§ 74. Определение места с помощью фазовой РНС средней дальности действия
§ 75. Определение маневренных элементов судна с помощью фазовых РНС
§ 76. Определение места с помощью импульсно-фазовых РНС
§ 77. Определение места судна с помощью сверхдлинноволновой фазовой РНС
Глава XVII. Определение места судна по навигационным искусственным спутникам Земли
§ 78. Общие сведения о спутниковых РНС
§ 79. Спутниковая РНС доплеровского типа
§ 80. Точность и дискретность определения места судна по спутниковой РНС «Транзит»
§ 81. Дальномерная СРНС на средневысоких орбитах
Глава XVIII. Использование радиолокационной станции для определения места судна
§ 82. Общие сведения о судовых РЛС
§ 83. Основные эксплуатационные характеристики судовых РЛС
§ 84. Основы чтения радиолокационного изображения
§ 85. Определение места судна с помощью РЛС
Глава XIX. Использование навигационных автоматизированных комплексов в морской навигации
§ 86. Общие сведения о навигационных автоматизированных комплексах (НАК)
§ 87. Особенности использования радиотехнических средств навигации в составе НАК
Р аздел 6 ПЛАВАНИЕ ПРИ ОСОБЫХ ОБСТОЯТЕЛЬСТВАХ
Глава XX. Подход к берегу с моря
§ 88 Общие понятия
§ 89. Использование одной изолинии
§ 90. Вопросы опознавания
§ 91. Подход к малоисследованным берегам
Глава XXI. Плавание в стесненных водах
§ 92. Общие понятия
§ 93. Особенности учета циркуляции
§ 94. Ограждающие изолинии
§ 95. Сетки изолиний
§ 96. Плавание по изолинии
§ 97. Береговые РЛС
§ 98. Необходимая ширина полосы свободного пространства для безопасной проводки судна
§ 99. Лоцманская проводка
§ 100. Постановка на якорь
Глава XXII. Плавание во льдах и при пониженной видимости
§ 101. Навигационные особенности ледового плавания
§ 102. Навигационные особенности плавания при пониженной видимости
Глава XXIII. Плавание по наивыгоднейшим путям
§ 103. Понятие наивыгоднейшего пути
§ 104. Дуга большого круга. Ее уравнение и основные параметры
§ 105. Приближенные методы расчета при плавании по дуге большого круга
§ 106. Выбор пути с учетом гидрометеорологических условий плавания
§ 107. Потоки судов. Плавание по рекомендованным путям
Глава XXIV. Особенности плавания по внутренним водным путям
§ 108. Основные понятия, определения и термины
§ 109. Навигационные особенности речного плавания
Список литературы
Предметный указатель
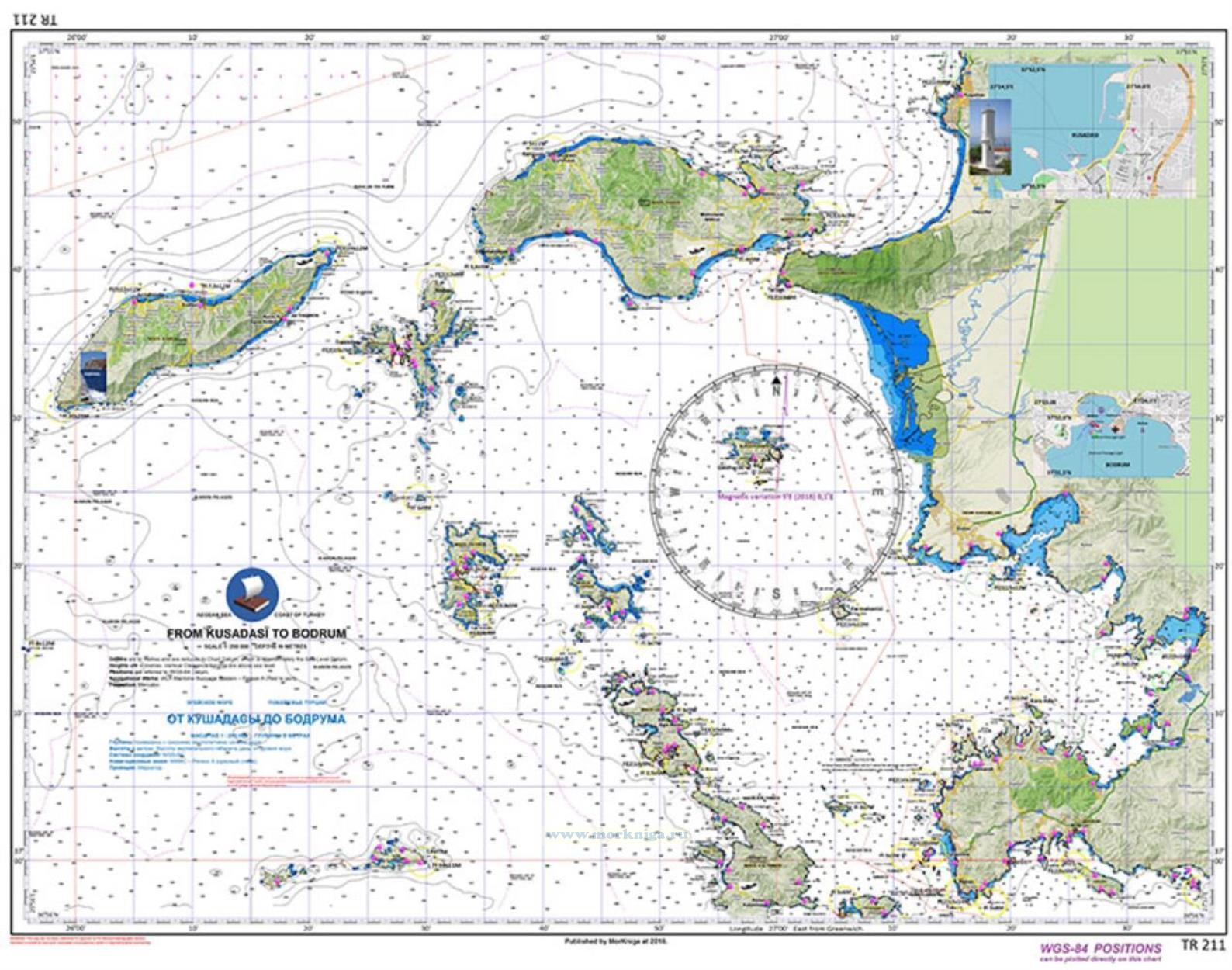 TR 211 Побережье Турции (Эгейское море). От Кушадасы до Бодрума. From Kusadasi to Bodrum
TR 211 Побережье Турции (Эгейское море). От Кушадасы до Бодрума. From Kusadasi to Bodrum  Задачник по навигации и лоции
Задачник по навигации и лоции  Плоттер RAYS
Плоттер RAYS